 At the back end of last year I looked at a device, called the Row-Bot, that had been developed by Bristol Robotics Laboratory. The device was designed to ‘feed’ on pollution in water, with the power required to operate the device generated by the way it processed the nutrients it consumed.
At the back end of last year I looked at a device, called the Row-Bot, that had been developed by Bristol Robotics Laboratory. The device was designed to ‘feed’ on pollution in water, with the power required to operate the device generated by the way it processed the nutrients it consumed.
The team hope that the device will come into its own in areas such as environmental clean up operations, and in environmental monitoring of toxic environments.
Large-scale ocean cleanup
Suffice to say, the Row-Bot is limited to an extent by its size, so for large-scale projects such as cleaning up an oil spill, it is perhaps unsuitable.
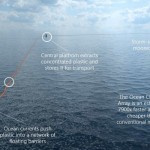
The floating barriers designed as part of the Ocean Cleanup project offer a possible solution for these huge projects. The project is believed to be the largest cleanup ever undertaken to try and remove as much of the 5.25 trillion pieces of plastic currently littering the oceans.
The project started back in 2013 after a successful Kickstarter campaign and a winner of the recent Katerva sustainability awards, and it aims to begin operating at full steam by 2020. Before then, they will undertake a number of pilot projects both in coastal areas and offshore.
The technology consists of a number of v-shaped floating barriers that are attached to the sea floor. As the current washes plastic through the barriers, they are caught up in the device, which then concentrates the plastic via a non-permeable screen that sits beneath the surface.
The device avoids picking up sea life and other un-wanted objects, with plastic transported into the center of the device, where it can then be extracted and recycled.
Whilst it sounds quite a time consuming process, the team believe they could remove 40% of the plastic contained in the infamous Great Pacific Garbage Patch in ten years, albeit by using a whopping 100km barrier.
It’s an interesting project, but given the scale of the device, I have doubts about its viability. Check out the video of the device in action below and let me know your thoughts.